

产品导航


产品搜索
输入产品关键字开始搜索
产品信息

一体化电机-iDT4系列 详细信息
更新时间:2014/4/25 16:31:38 点击:433

产品简介

• Low voltage up to 48 V • CANopen • Continuous power up to 260 W • Local I/Os
详细资料
The torque motor, servo controller, and phase-angle sensor of the AMKASMART iDT4 form a compact unit ready for immediate connection. This unit offers very good servo characteristics and on-board control intelligence.
The digital microprocessor controller features a comprehensive function package with the many advantages of a modern servo axis:
The iDT4 operates in the low-voltage range up to 48 V and continuous power up to 260 W.
The iDT4 operates in the low-voltage range up to 48 V and continuous power up to 260 W.
The AMKASMART IDT is available in three power ratings. The motor can optionally be supplied with a mechanical holding brake, gearbox and/or a multiturn encoder.
The AMKASMART IDT4 is now also available with an optional Modbus interface. This means that it will now also be possible to exchange data between IDTs and controllers with the Modbus RTU protocol via an RS485 interface.
The AMKASMART IDT in conjunction with the AMKASYN drive system
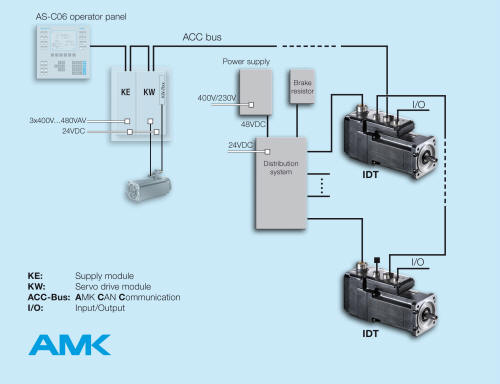
Because the device features a manually configurable communication address, it is easy to integrate into a higher-level system structure. Thanks to the ACC system bus (based on CANopen), the AMKASMART IDT is able to communicate with external control systems and other drives. This makes for maximum flexibility in terms of the system architecture: The AMKASMART iDT servo axes can be used with integrated or distributed drive solutions. Because of the extensive drive functionality and installation accessories that are available, the devices can be used to create stand-alone solutions or combined with other drive and control systems with a high level of ease and convenience.
应用范围
· A substitute for stepper motor applications
· An actuating drive (infeed tasks and adjustment of mech. stops for format changes)
· A servo axis for medium-performance applications
· An independent positioning axis on machines
· A synchronous drive
产品优势
· Torque control
· Speed and position control
· Positioning
· Search for reference
· Electronic gears
· Synchronous running control
· Stepper motor control
· Braking management
技术数据
Motor type | Flang-esquare [mm] | Mo [Nm] | Pn [W] | nn [U/min] | Mma [Nm] | Nmax [1/min] | Un [VDC] | In (A) | J [kgcm²) | L [mm] | Lbr [mm] | m [kg] | Mb r[Nm] | Jbr [kgcm²] | mbr [kg] |
IDT4-1-10-xx0-4000 | 70 | 0,70 | 210 | 3000 | 2,1 | 6000 | 48 | 8,6 | 0,36 | 153 | 186 | 2,0 | 4 | 0,06 | 0,7 |
IDT4-2-10-xx0-2500 | 70 | 1,20 | 240 | 2000 | 3,0 | 6000 | 48 | 8,6 | 0,68 | 183 | 216 | 2,7 | 4 | 0,06 | 0,7 |
IDT4-4-10-xx0-1300 | 70 | 2,50 | 260 | 1000 | 7,0 | 6000 | 48 | 8,6 | 1,44 | 243 | 276 | 4,3 | 4 | 0,06 | 0,7 |
Explanation of characteristic quantities:
Mo ... Continuous static torque
Mo ... Continuous static torque
Pn ... Rated power
nn ... Rated speed
Mmax ... Maximum torque
Nmax ... Max. mechanical speed
Un ... Input voltage
Un ... Input voltage
In ... Current input
J ... Inertia
L ... Overall length
Lbr ... Overall length including brake
J ... Inertia
L ... Overall length
Lbr ... Overall length including brake
m .... Mass
Mbr ... Holding brake torque
Jbr ... Holding brake inertia
m .... Holding brake mass